
LOE
[Isaac sim Tutorial] Part 3. RTX Lidar sensors 본문
출처
https://docs.isaacsim.omniverse.nvidia.com/5.0.0/ros2_tutorials/tutorial_ros2_rtx_lidar.html
RTX Lidar Sensors — Isaac Sim Documentation
RTX Lidar Sensors Isaac Sim RTX or Raytraced Lidar supports both Solid State and Rotating Lidar configuration via a JSON config file. Each RTX Sensor must be attached to its own viewport to simulate properly. Warning Docking windows in the isaac-sim UI whe
docs.isaacsim.omniverse.nvidia.com
Adding RTX Lidar


- 2d lidar를 먼저 추가해줍니다 이후 turtle bot의 라이다 위치에 해당 라이다를 위치해줍니다. 이후 base_scan이 2d_lidar의 원점이 되었으므로 transform을 다 0으로 만들어 줍니다.


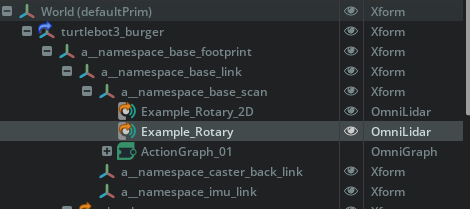
- 이후 3d lidar또한 추가해 줍니다.
creating action graph

- Window > Graph Editors > Action Graph를 통해 액션그래프를 만든 후 이를 lidar의 namespace_base_scan아래로 넣는다. (이렇게 하면 로봇의 namespace가 자동으로 추가되어 multi robot을 control할때에 충돌날 일이 없어진다!)
- isaac create render product : lidar를 설정하는 노드로 각각 2d lidar, 3d lidar를 설정해줍니다.
- ROS2 RTX Lidar Helper : 이 노드는 2d lidar와 3d lidar로 각각 연결되어 laserscan과 pointcloud 토픽을 발행하게 됩니다. 2d lidar와 3d lidar에 frameID를 base_scan으로 변경해주고 이름을 토픽명을 각각 scans, points로 변경합니다.

rviz2에서 관찰한 points
'isaac sim & lab' 카테고리의 다른 글
| [Isaac sim Tutorial] Part 5. ROS2 Publish rate, Qos 조정 (0) | 2025.12.01 |
|---|---|
| [Isaac sim Tutorial] Part 4. TF trees and Odometry (0) | 2025.11.28 |
| [Isaac sim Tutorial] Part 2. Ros2 Cameras (0) | 2025.11.27 |
| [Isaac sim Tutorial] Part 1. Turtle bot을 통한 ros 연결 (0) | 2025.11.26 |
| ubuntu 22.04에서 isaac sim 5.0 세팅 하는법 (0) | 2025.11.26 |
'isaac sim & lab' Related Articles
more



